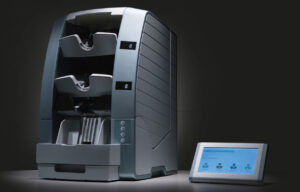
IoT for banknote processing devices
RTSoft enhanced a complex IoT solution for G+D, a banknote processing systems manufacturer, by integrating an industrial LWM2M protocol.

RTSReality for tourism business
RTSReality: Onboard infotainment for tourism with real-time attraction recognition, streaming, and 3D urban reconstruction.
Unified Embedded Device Management Platform
RTSoft’s Unified Embedded Device Management Platform for IoT: Enhanced security, OTA updates, and cloud-based solutions.

Remote Software Updates for Banknote Security
RTSoft enhances banknote security with cross-platform, automated software updates and data exchange for G+D systems.

Empathic Cockpit: Next-Gen Digital Auto Interface
RTSoft and Motherson innovate ‘The Empathic Cockpit’, blending AR, Gesture Control for advanced automotive comfort.”

STM32MP1: Smart Robotics Firmware
RTSoft’s STM32MP1 firmware boosts smart robotics with cloud connectivity, real-time control, and OTA updates.

Smart Energy OTA: Efficient Firmware Updates
RTSoft’s cloud-based OTA update system enhances smart energy controllers with secure, efficient firmware management.

Metro Crowd Control: AI-Powered CCTV
RTSoft’s AI solution for metro CCTV systems enhances passenger flow management with accurate people counting.